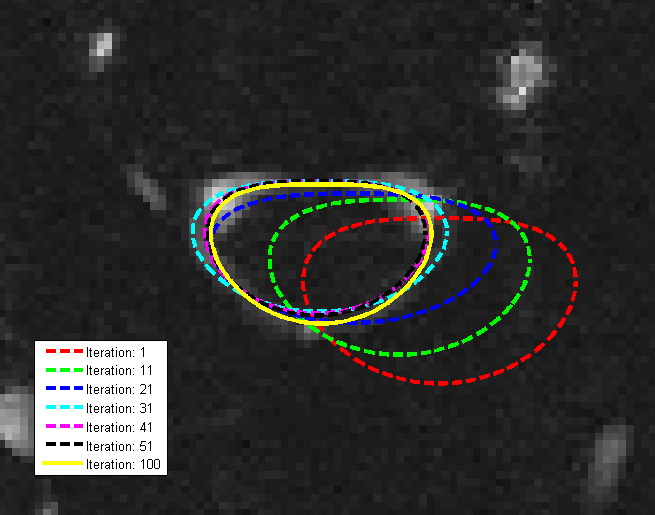
I have been working with Prof. Kim L. Boyer to develop a novel approach, the Active Geometric
Shape Models, to fit parametric shapes to data
and images. Our paper is published on CVIU.
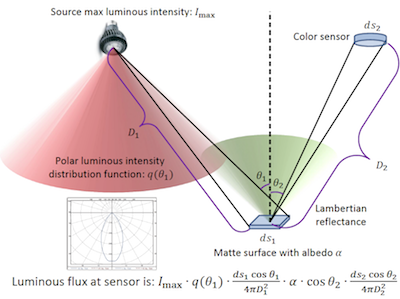
With multiple color-controllable LED fixtures and color sensors, our COSBOS technique enables
low-cost and privacy-preserving occupancy
distribution estimation. The direct application of this technique is occupancy-sensitive smart
lighting, in which the system automatically delivers the light that best suits the occupancy
scenario in an indoor space.
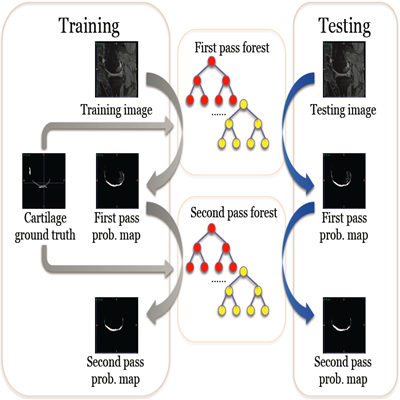
Learning-Based Knee Cartilage Segmentation in 3D MR
The automatic segmentation of human knee cartilage from 3D MR images is challenging due to the
thin sheet structure of the cartilage
with diffuse boundaries and inhomogeneous intensities. We present an iterative multi-class
learning method to segment the femoral, tibial and patellar cartilage simultaneously, which
effectively exploits the spatial contextual constraints
between bone and cartilage, and also between different cartilages. High accuracy and robustness
is achieved on 176 volumes from the OAI dataset.
We apply manifold learning techniques including multidimensional scaling (MDS) and Isomap on
high-level semantics-sensitive pairwise image
distances, such as IMED, SPM, IRM and their variants to learn fixed-length vector representations
of images. We are looking at applications including style categorization, scene classification
and object recognition.
GMM-Based Hidden Markov Random Field for Color Image and 3D Volume Segmentation
This is the final project of Prof. Qiang Ji's course Introduction to Probabilistic Graphical
Models. In this project, we first study
the Gaussian-based hidden Markov random field (HMRF) model and its expectationmaximization (EM)
algorithm. Then we generalize it to Gaussian mixture model-based hidden Markov random field. The
algorithm is implemented in MATLAB. We
also apply this algorithm to color image segmentation problems and 3D volume segmentation
problems. Download the paper here. Download the Matlab code here.
Hidden Markov Random Field Model, its Expectation-Maximization Algorithm,
Implementation, and Applications in Edge-Prior-Preserving Image Segmentation
This is the final project of Prof. Birsen Yazıcı's course Detection and Estimation Theory. In
this project, we study the hidden Markov
random field (HMRF) model and its expectation-maximization (EM) algorithm. We implement a MATLAB
toolbox named HMRF-EM-image for 2D image segmentation using the HMRF-EM framework. This toolbox
also implements edge-prior-preserving
image segmentation, and can be easily reconfigured for other problems, such as 3D image
segmentation. Download the paper here. Download the HMRF-EM-image Matlab toolbox here.
Kernel Principal Component Analysis and its Applications in Face Recognition and
Active Shape Models
This is the final project of Prof. Qiang Ji's course Pattern Recognition. In this paper, we
discussed the theories of PCA, kernel PCA and
ASMs. Then we focused on the pre- image reconstruction for Gaussian kernel PCA, and used this
technique to design kernel PCA based ASMs. We tested kernel PCA on synthetic data and human face
images, and found that Gaussian kernel PCA
succeeded in revealing more complicated structures of data than traditional PCA and achieving
much lower classification error rate. We also implemented the Gaussian kernel PCA based ASMs and
tested it on human face images. We found
that Gaussian kernel PCA based ASMs is promising in providing more deformation patterns than
traditional ASMs.
Download the paper here.
Download the PPT here. Download the Matlab code here.
Tracking Based 3D Visualization from 2D Videos
This is the final project of Prof. Qiang Ji's course Computer Vision. In this project, we
established a framework to convert 2D videos
to pseudo 3D videos. Our basic idea is to track the moving objects in the video and separate them
from the background. Then we give different depth information to the objects and the background,
and visualize them in 3D.
Download the report here.
Here is a demo of our 3D animations. Please wear blue-red 3D glasses.
 I have been working with Prof. Kim L. Boyer to develop a novel approach, the Active Geometric
Shape Models, to fit parametric shapes to data
and images. Our paper is published on CVIU.
I have been working with Prof. Kim L. Boyer to develop a novel approach, the Active Geometric
Shape Models, to fit parametric shapes to data
and images. Our paper is published on CVIU.
 With multiple color-controllable LED fixtures and color sensors, our COSBOS technique enables
low-cost and privacy-preserving occupancy
distribution estimation. The direct application of this technique is occupancy-sensitive smart
lighting, in which the system automatically delivers the light that best suits the occupancy
scenario in an indoor space.
With multiple color-controllable LED fixtures and color sensors, our COSBOS technique enables
low-cost and privacy-preserving occupancy
distribution estimation. The direct application of this technique is occupancy-sensitive smart
lighting, in which the system automatically delivers the light that best suits the occupancy
scenario in an indoor space.
 The automatic segmentation of human knee cartilage from 3D MR images is challenging due to the
thin sheet structure of the cartilage
with diffuse boundaries and inhomogeneous intensities. We present an iterative multi-class
learning method to segment the femoral, tibial and patellar cartilage simultaneously, which
effectively exploits the spatial contextual constraints
between bone and cartilage, and also between different cartilages. High accuracy and robustness
is achieved on 176 volumes from the OAI dataset.
The automatic segmentation of human knee cartilage from 3D MR images is challenging due to the
thin sheet structure of the cartilage
with diffuse boundaries and inhomogeneous intensities. We present an iterative multi-class
learning method to segment the femoral, tibial and patellar cartilage simultaneously, which
effectively exploits the spatial contextual constraints
between bone and cartilage, and also between different cartilages. High accuracy and robustness
is achieved on 176 volumes from the OAI dataset.
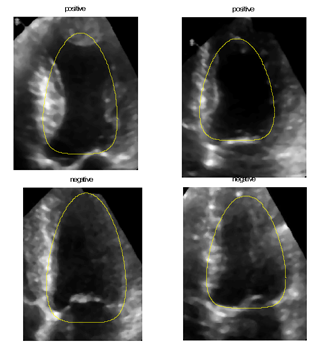
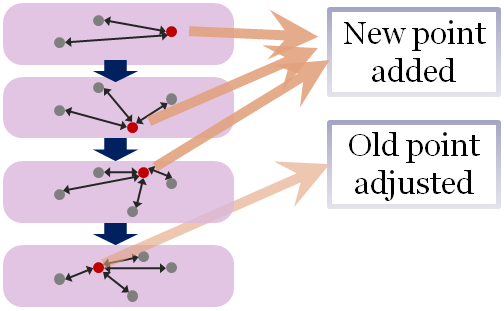
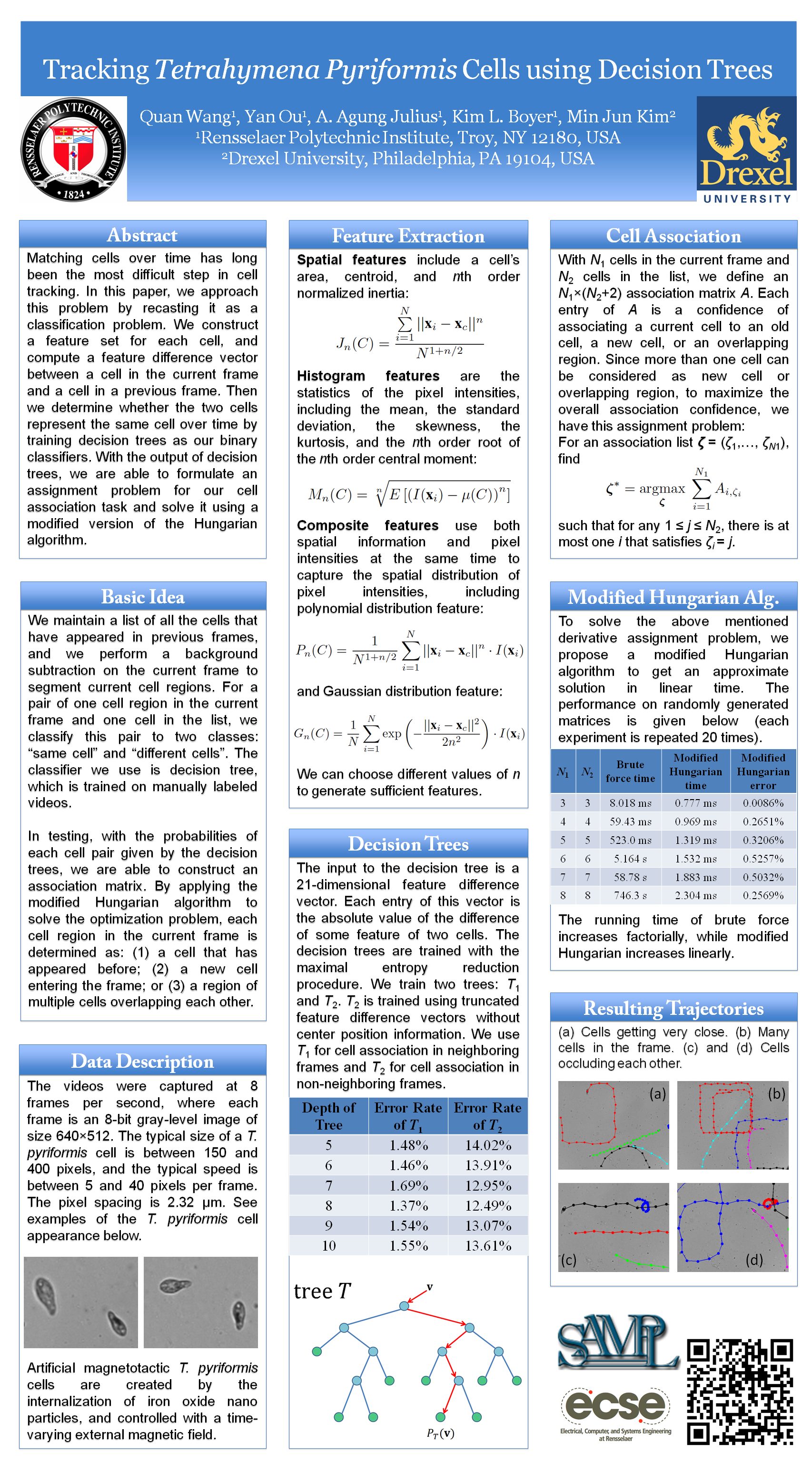
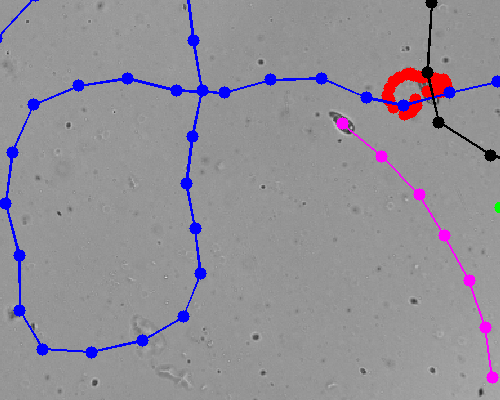 We approach the cell tracking problem by interpreting it as a classification problem. Our paper
is published on ICPR 2012.
We approach the cell tracking problem by interpreting it as a classification problem. Our paper
is published on ICPR 2012.
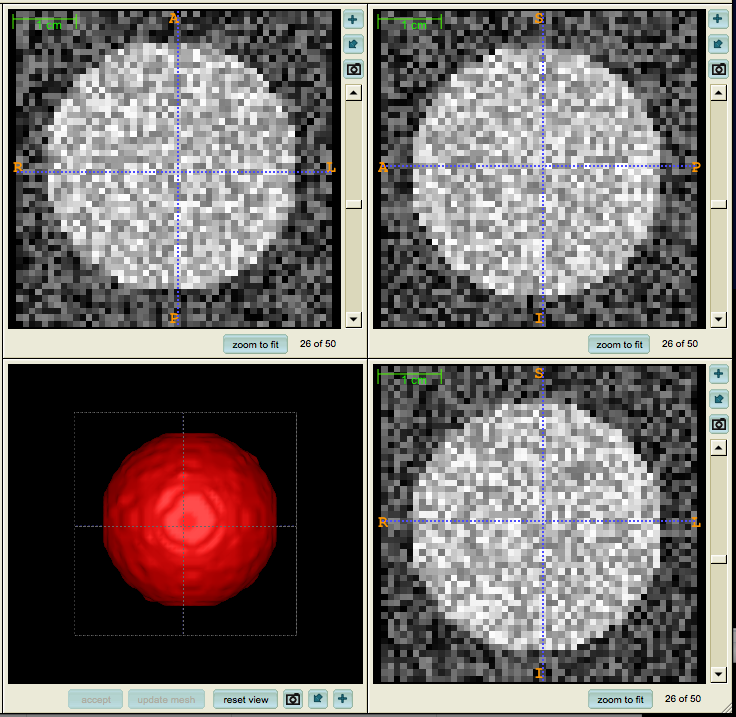
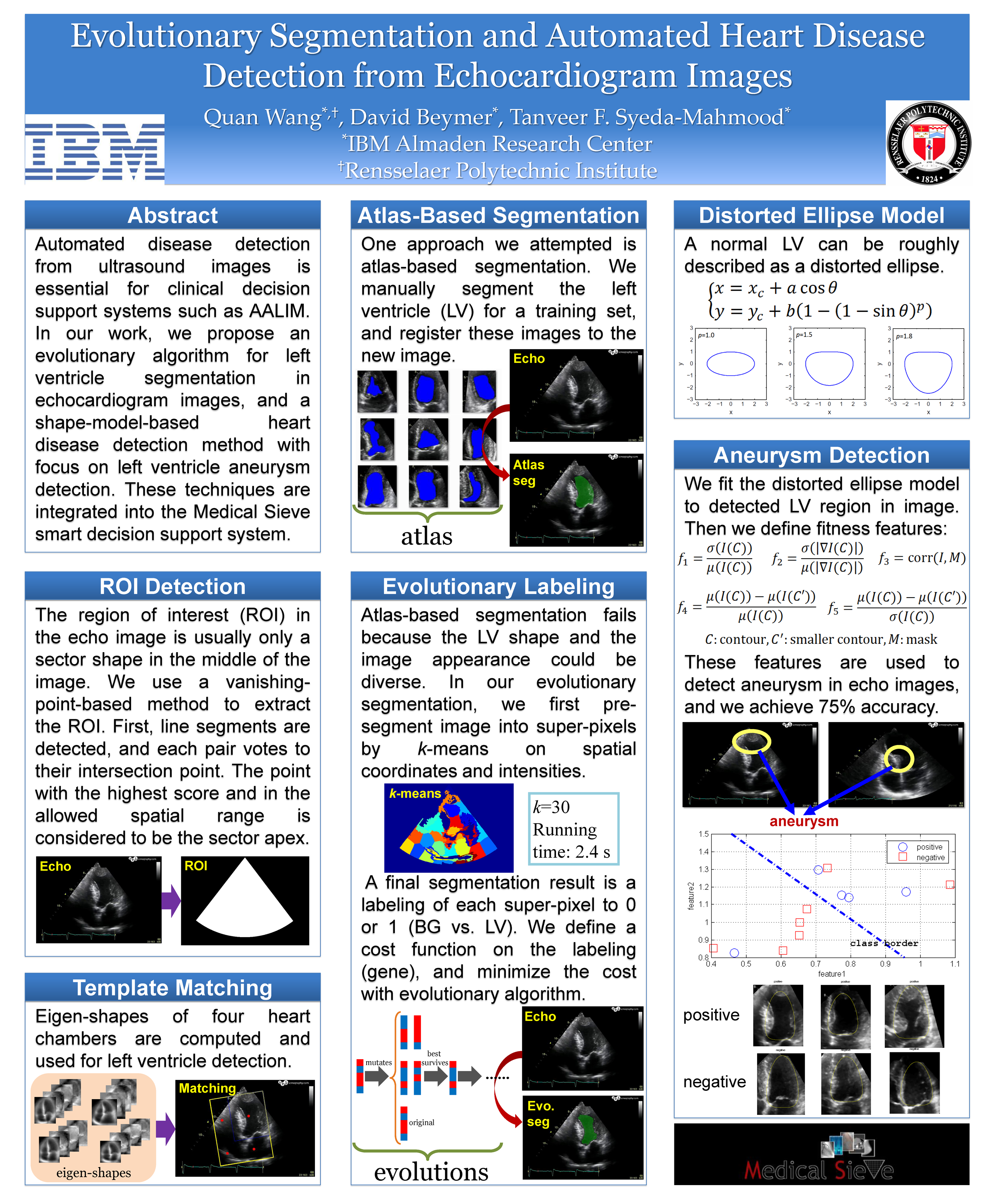
 This is my work as an Research Intern at IBM. It is part of the Medical Sieve project.
This is my work as an Research Intern at IBM. It is part of the Medical Sieve project.
 We apply manifold learning techniques including multidimensional scaling (MDS) and Isomap on
high-level semantics-sensitive pairwise image
distances, such as IMED, SPM, IRM and their variants to learn fixed-length vector representations
of images. We are looking at applications including style categorization, scene classification
and object recognition.
We apply manifold learning techniques including multidimensional scaling (MDS) and Isomap on
high-level semantics-sensitive pairwise image
distances, such as IMED, SPM, IRM and their variants to learn fixed-length vector representations
of images. We are looking at applications including style categorization, scene classification
and object recognition.
 This is the final project of Prof. Qiang Ji's course Introduction to Probabilistic Graphical
Models. In this project, we first study
the Gaussian-based hidden Markov random field (HMRF) model and its expectationmaximization (EM)
algorithm. Then we generalize it to Gaussian mixture model-based hidden Markov random field. The
algorithm is implemented in MATLAB. We
also apply this algorithm to color image segmentation problems and 3D volume segmentation
problems.
This is the final project of Prof. Qiang Ji's course Introduction to Probabilistic Graphical
Models. In this project, we first study
the Gaussian-based hidden Markov random field (HMRF) model and its expectationmaximization (EM)
algorithm. Then we generalize it to Gaussian mixture model-based hidden Markov random field. The
algorithm is implemented in MATLAB. We
also apply this algorithm to color image segmentation problems and 3D volume segmentation
problems.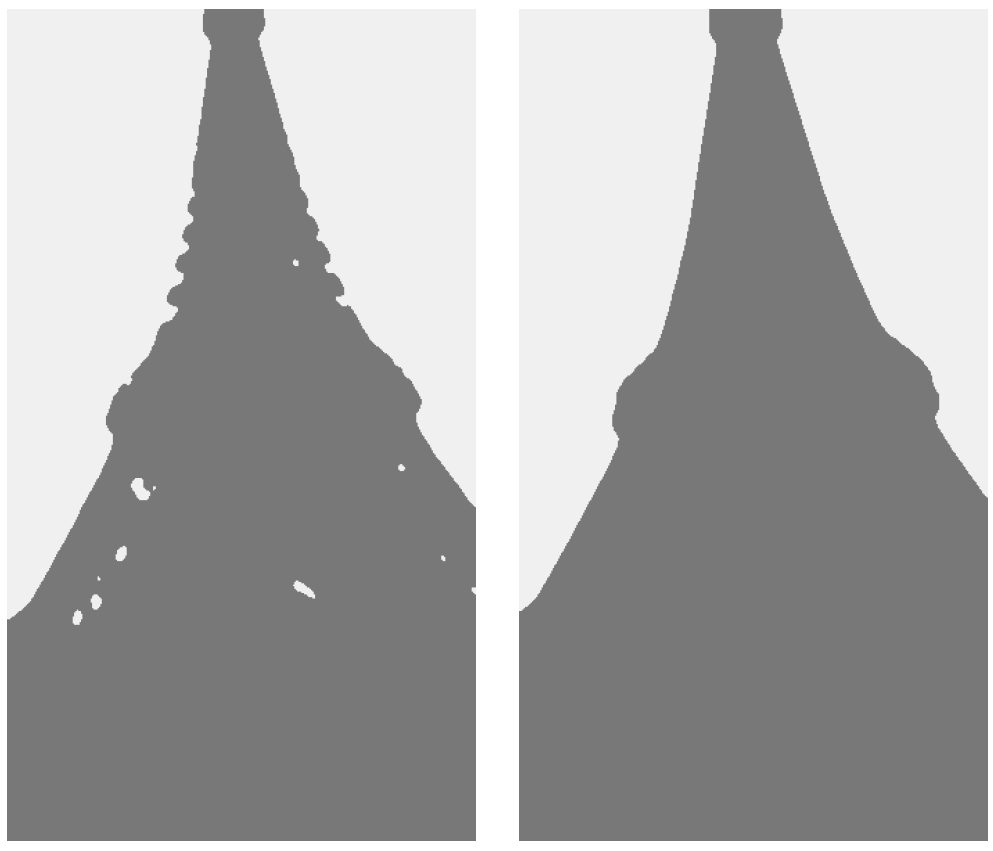 This is the final project of Prof. Birsen Yazıcı's course Detection and Estimation Theory. In
this project, we study the hidden Markov
random field (HMRF) model and its expectation-maximization (EM) algorithm. We implement a MATLAB
toolbox named HMRF-EM-image for 2D image segmentation using the HMRF-EM framework. This toolbox
also implements edge-prior-preserving
image segmentation, and can be easily reconfigured for other problems, such as 3D image
segmentation.
This is the final project of Prof. Birsen Yazıcı's course Detection and Estimation Theory. In
this project, we study the hidden Markov
random field (HMRF) model and its expectation-maximization (EM) algorithm. We implement a MATLAB
toolbox named HMRF-EM-image for 2D image segmentation using the HMRF-EM framework. This toolbox
also implements edge-prior-preserving
image segmentation, and can be easily reconfigured for other problems, such as 3D image
segmentation.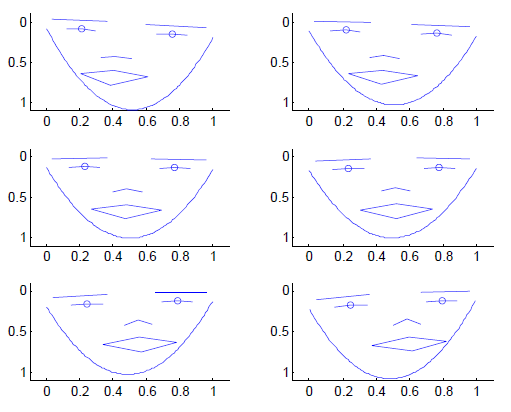 This is the final project of Prof. Qiang Ji's course Pattern Recognition. In this paper, we
discussed the theories of PCA, kernel PCA and
ASMs. Then we focused on the pre- image reconstruction for Gaussian kernel PCA, and used this
technique to design kernel PCA based ASMs. We tested kernel PCA on synthetic data and human face
images, and found that Gaussian kernel PCA
succeeded in revealing more complicated structures of data than traditional PCA and achieving
much lower classification error rate. We also implemented the Gaussian kernel PCA based ASMs and
tested it on human face images. We found
that Gaussian kernel PCA based ASMs is promising in providing more deformation patterns than
traditional ASMs.
This is the final project of Prof. Qiang Ji's course Pattern Recognition. In this paper, we
discussed the theories of PCA, kernel PCA and
ASMs. Then we focused on the pre- image reconstruction for Gaussian kernel PCA, and used this
technique to design kernel PCA based ASMs. We tested kernel PCA on synthetic data and human face
images, and found that Gaussian kernel PCA
succeeded in revealing more complicated structures of data than traditional PCA and achieving
much lower classification error rate. We also implemented the Gaussian kernel PCA based ASMs and
tested it on human face images. We found
that Gaussian kernel PCA based ASMs is promising in providing more deformation patterns than
traditional ASMs.
 This is the final project for the course Software Design & Documentation at RPI.
This is the final project for the course Software Design & Documentation at RPI.
{kind=link}
{kind=link}
{kind=link}
{kind=link}